初めてのコネクター作成でToFセンサーにQiコネクターをつける
またRoombaを使った電子工作関係の話の続き。 ちょっと趣向を変えて、今回はコネクターを作ることにした。 (使った工具とコネクター類は最後にリンクを貼る)
現状の接続はちょっと冗長かつ不安定で、
RPi<-ジャンパーワイヤー->ブレッドボード<-ジャンパーワイヤー-><-ToF導線->ToF
となっている。ジャンパーワイヤーとToF導線の間は単にジャンパーワイヤーのメスにToFの導線を突っ込んでいるだけなのでスルッと抜ける。
これをコネクターをつけることで次のようにしたい。
RPi<-ジャンパーワイヤー->ブレッドボード<-ToF導線withコネクター->ToF
これまで一度もワイヤーの被膜を剥がす、ということをやったことがなく、また圧着というのもやったことがない状態だったので、まずはお試しから。
ということで手持ちにあったジャンパーワイヤーの1つを取り出して……
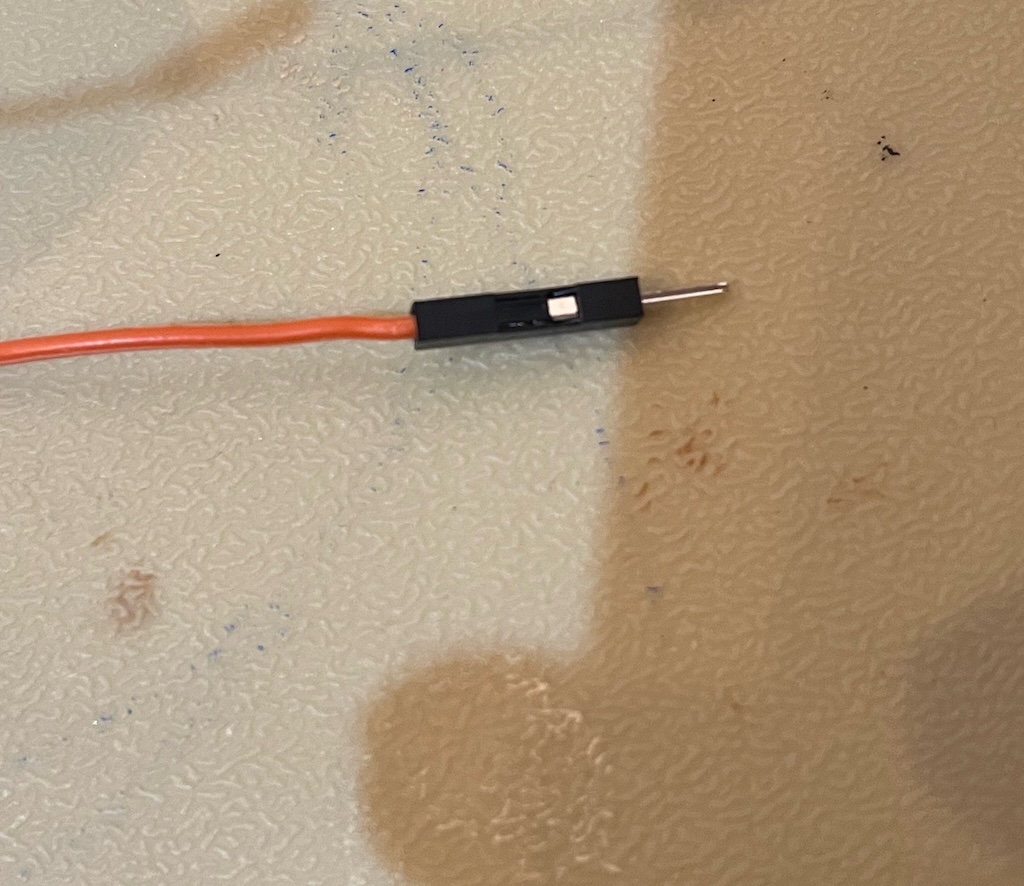
ジョキっと。(上にある半端な切れ端は、ワイヤーストリッパーと勘違いして圧着を何度も繰り返して無駄に汚くてしまったのに後から気付き、そのミスもろとも切り落とされた様子)

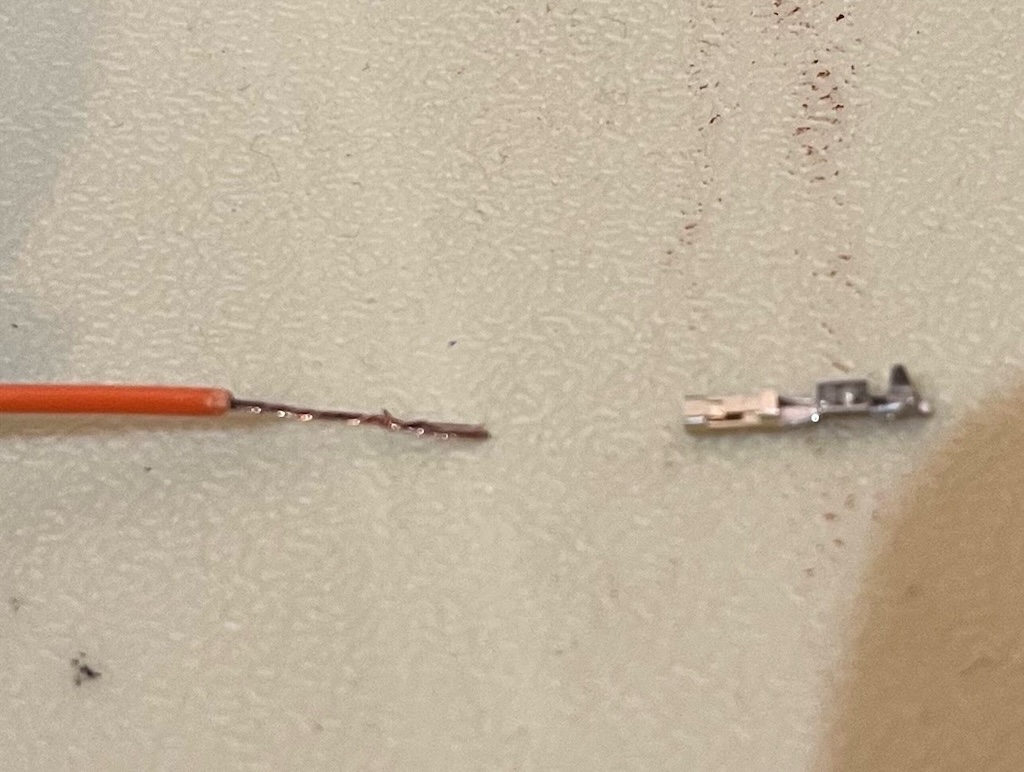
ワイヤーストリッパーで被膜を切って手で強めに引っ張ったらこんな感じで導線が出てくるので、右側のコネクターへ。 (ちなみにこの導線では長すぎたので、この後半分以下くらいの長さにした。あと、実際につけるときの右側のコネクターは向きが反対。大きなとっかかりみたいな方目掛けて導線を入れていく。)
で、実際に入れて圧着ペンチでぐぐぐっとやっていくのだけど、入れる穴や向きがよくわかっていなくて失敗した結果、コネクターをダメにしたのがこれ。 爪と呼ばれる?導線を押さえる箇所が2箇所ある。左のはその内の導線を押さえる方の小さい爪が外側に向いてしまっているし、右のは被膜がついた状態の導線を押さえる方の大きい爪が外側に向いてしまっている。

結局どうやるのいいのかなと、何度か試しながら個人的に思ったのは、ねじ止めに近い感じ。 少し大きめの穴ので軽めに圧着して2つの爪をどちらも仮止めして、なんとなく巻き付いているなあという具合にしてから、その後ピッタリハマるサイズので本格的に圧着する。 もっとうまいやり方があるかもしれないけど、ひとまず自分はそれでスイスイ進められるようになった。
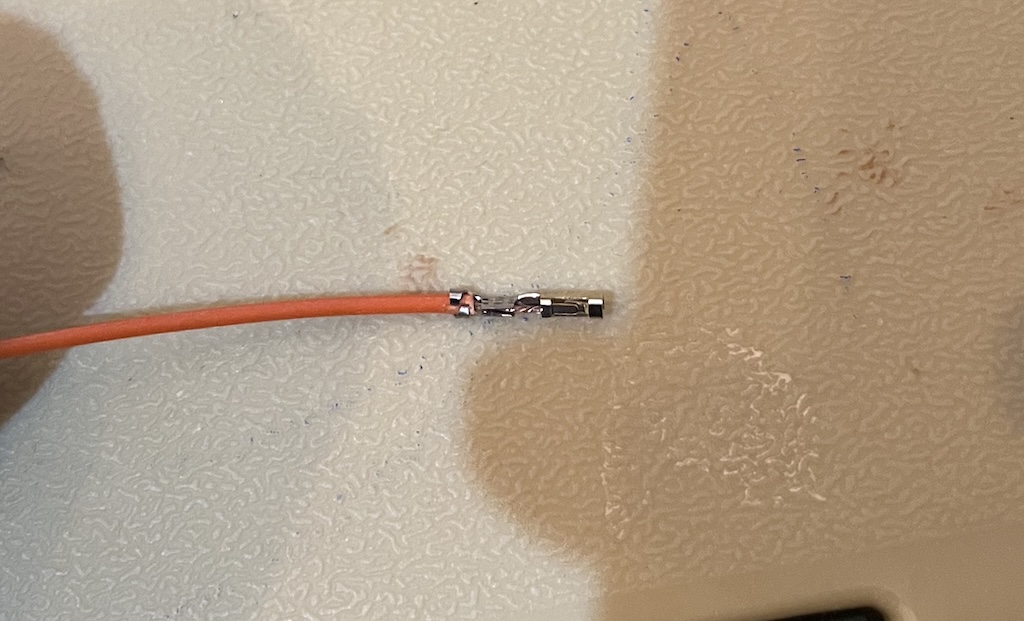
無事ついたらこんな感じ。まだ慣れてなくてなんだか爪の巻きつき方が汚いけど、やっていくともっとガシッとまるーく掴んでくれているような見た目になる。
ちなみにコネクターは、どれを使うべきかわからなかったからそれっぽいのを2種類買っていたのだけど、Qiコネクター(ジャンプワイヤーと同じやつ)は上。買った当時は、店員さんからの説明を受けても理解に確信を持てなかったし値段が安かったので両方買いました、小さな富豪ムーブ。

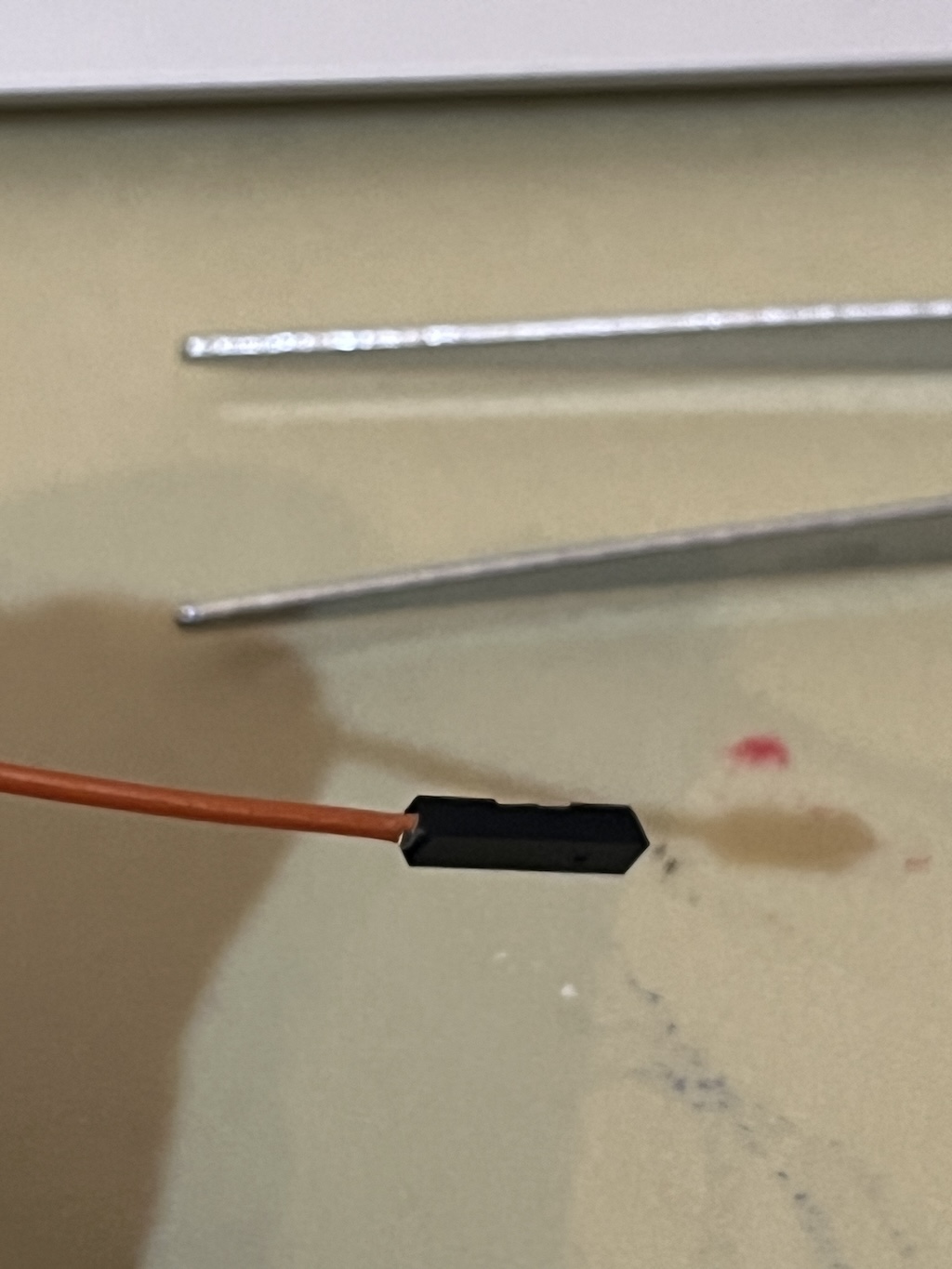
最後にハウジング(取れたりとか端子同士がくっついて事故になったりしないようにするためにつけるやつ、と理解してる)をつけて完成。
いざやってみて、やり方に慣れてくると、こんなもんか、という気持ちになる。 やってみるの大事。
元々やりたかったのは、ToFセンサーから出ている導線にコネクターをつけることだったので、上のお試し結果を踏まえて実践。 今回はブレッドボードに挿したかったからオスのコネクターをつけて、同じようにハウジングをつける、というのを4つやった。
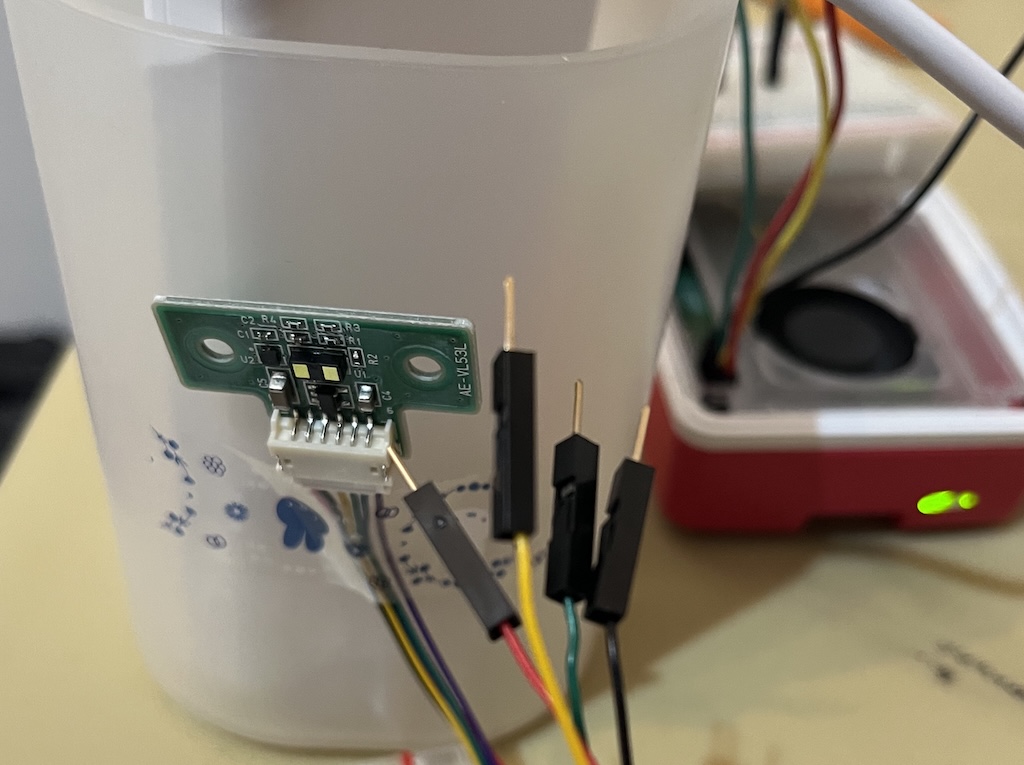
そして最後は疎通の確認をして、ToFセンサーのアドレスは0x52で、これが7ビットアドレス(I2Cでの表記)だと0x29ということで29のところに値が出ることを確認して終わり。
(単純な確認方法がわからなくてデータシートを見ても0x52=82としか書いてなかったから混乱したけど、01010010を1ビット右にシフトすると0101001で0x29=41になる。)
1
2
3
4
5
6
7
8
9
10
$ i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- 29 -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
参考:今回使った部品と工具類
- ブレッドボード
- ジャンパーワイヤー
- ToFセンサー VL53L1X使用 レーザー測距センサー (
AE-VL53L1X) - QI端子(メス) ケーブル用コネクター (
2226TG) - QI端子(オス) 信号伝達コネクター(ピンコネクター) (
A295-TM12548) - QIハウジング コネクター用ハウジング 1P (
2226A-01) - 圧着ペンチ 精密圧着ペンチ (
PA-24) - ワイヤーストリッパー 万能電工ペンチ (
FA106)